
V sucasnej dobe je rozmach robotickych kosaciek, ktore maju aj po niekolkych rokoch stale vysoku obstaravaciu cenu niekolko stoviek az tisicok eur. Rozhodol som sa, ze skusim jednu postavit.
Ako pohon som zvolil 2 kusy motorcekou so “snekovou” prevodovkou s prevodovym pomerom 1:100 s vystupnymi otackami cca 30rpm. Ovladac motorov je Monster Dual Driver a program je v Arduino Mega. Prvotny ciel bolo postavit “nieco” co sa bude dat ovladat dialkovym ovladacom. Zo stareho RC auticka som vybral elektroniku a podla datasheetu na internete som vystupy pripojil na vstupy arduina. Dialkove ovladanie som nechal bez zmeny. Je to klasicke lacne dialkove ovladanie s povelmi Dopredu-dozadu, dolava-doprava.
Takto som ozivil jednoduche vozitko, ktore sa dalo ovladat dialkovym ovladacom po dvore. Ako dalsi potrebny prvok sa ukazal bluetooth modul. Nie na ovladanie ale na nahravanie kodu do arduina. Stale pripajat a odpajat usb kabel sa stalo velmi rychlo travnym ukonom a tak som arduino doplnil o bluetooth modul. Hned bolo nahravanie kodu do arduina pohodlnejsie.
Nasledovalo doplnenie o displej, ktory by zobral rozne stavove stavy, premenne atd. Dvojriadkovy displej 16×2 sa mi zdal velky a preto som zvolil 0,96″ OLED displej. OLED displeje maju malu spotrebu, su dobre citatelne a daju sa pripojit priamo na I2C zbernicu bez pouzitia externej elektroniky ako je tomu napr. pri spominanych 16×2 displejoch.
Skusil som pouzitie kompasu, gyroskopu aj akcelerometra ale v tejto faze ich pouzitie bolo predcasne a tak som ich odlozil na neskor.
Ked bolo vozitko/kosacka jazdyschopna, zobral som ju na dvor na prvu skusku. Nedopadlo to dobre. Motory slabe, kosacka zastavala, kolieska nevladali prekonat prekazky v trave a niektore nerovnosti. Este spomeniem ze koncepcia bola 2 motory, jeden na kazdu stranu a v predu v strede otocne volne nehnane koliesko. Toto sa ukazalo ako nie vhodna cesta. Doobjednal som teda dalsie 2 motory a dorobil som vozitku pohon 4×4. Kazde koleso malo teraz svoj motor.
V ramci domaceho testovania som pridal ultrazvukovy detektor prekazok + dva infracervene snimace prekazok po stranach co najblizsie nad predne dva kolesa. Dalsi test na dvore dopadol lepsie ako prvy ale stale to nebolo ono. Tak som hladal ine moznosti pohonu a na internete som nasiel este lepsie vykonnejsie motory s planetovymi prevodovkami a enkodermi na hriadelke. Po prelozeni motorov som sa vratil k povodnej koncepcii 2 motory a jedno volne otocne koliesko. Test v exterieri este neprebehol tak neviem ci to bude postacujuce.
Momentalny stav je taky, ze vozitko ma aj kompas, ktory sa po zapnuti skalibruje (vozitko sa otaca na mieste okolo svojej osi), po prvotnom poveli z RC ovladaca sa pohne vpred a riadi sa snimacmi na prekazky. Pri detekcii prekazky, cuvne, otoci sa do strany a pokracuje. Zaroven si meria prejdenu vzdialenost pomocou enkoderov na motoroch. Pocas tohto automatickeho rezimu sa da vozitko akokolvek ovladat pomocou RC ovladaca (stop, dolava, doprava, vpred). Po uvolneni tlacidla na RC ovladaci pokracuje dalej len podla snimacov.
O samotne kosenie sa bude starat arduino nano, ktore bude vo vysledku komunikovat s arduinom mega, a bude ovladat BLDC motor. Tuto cast mam ozivenu samostatne.
Este mam toho pred sebou vela na to, aby to zacalo kosit travu.
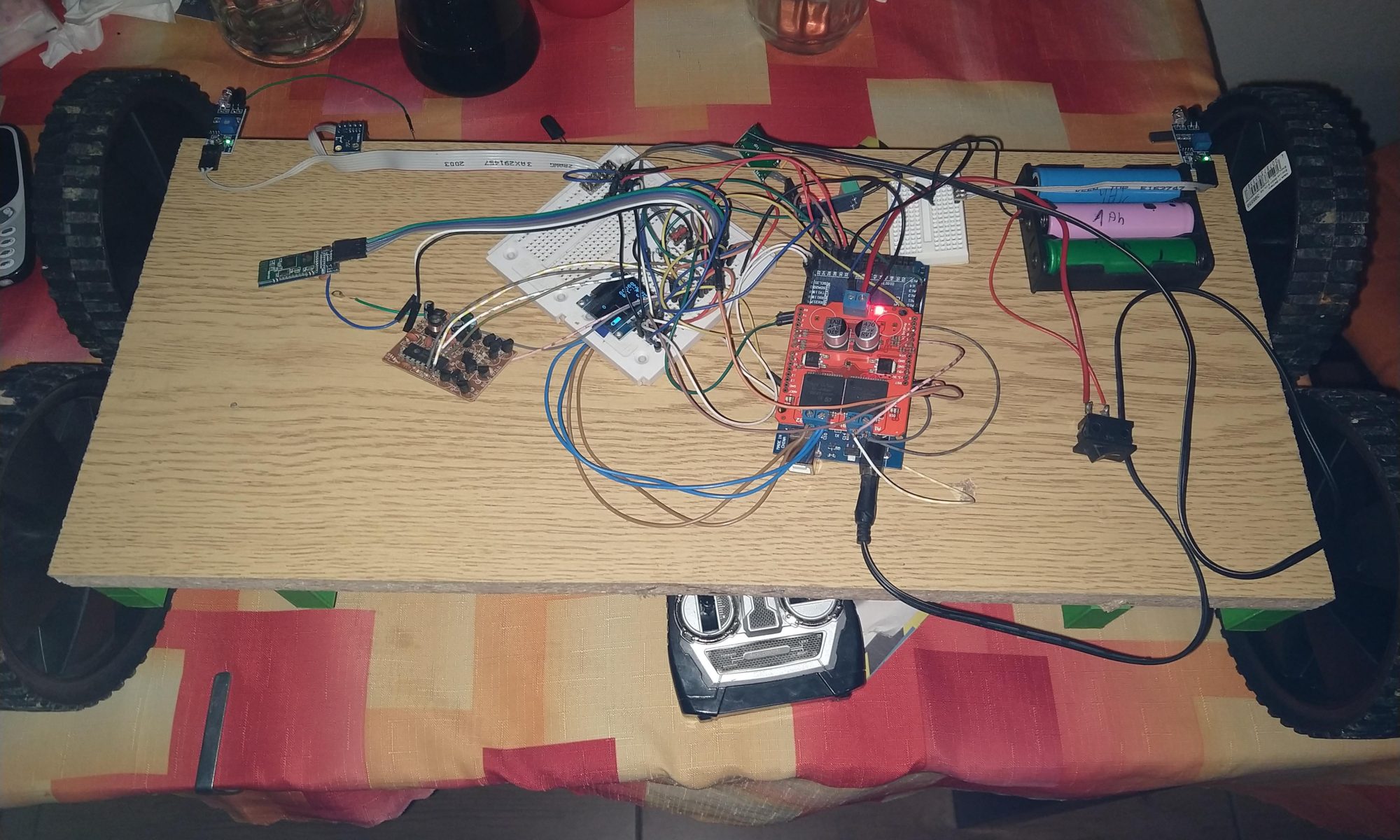
Verzia zo slabsimi motormi 

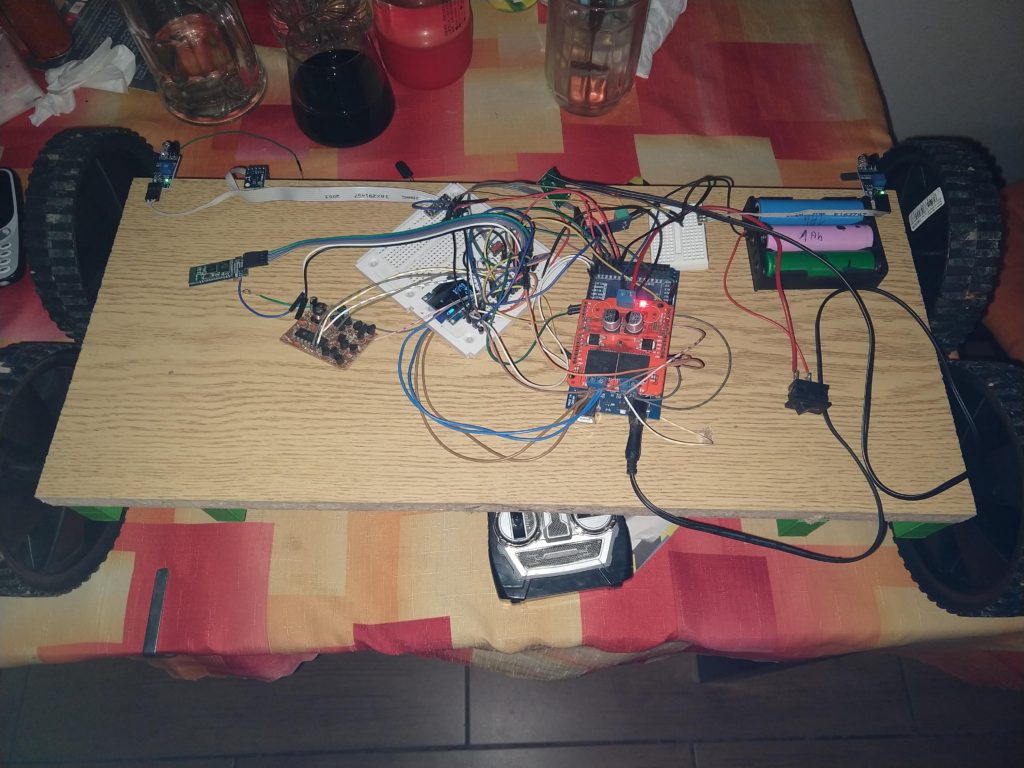
Nove silnejsie motory s enkodermi